新着情報 タワークレーンの3次元自動誘導システムを開発 タワークレーン2次元自動誘導システムをバージョンアップ
2020/10/07
戸田建設(株)(社長:今井 雅則)は、揚重作業にかかる負担の軽減と作業効率の向上に向け、タワークレーンの3次元自動誘導システムを開発しました。
このタワークレーンの自動誘導技術は、従来、手動で行っていた操作をBIM等を活用して自動で行うもので、オペレータの負担軽減を図り、かつ、効率良く安全にタワークレーンを操作することができます。また、余分な電力の消費を抑え、作業所の省エネルギー化にも繋がります。
当社は鉄骨部材などの揚重作業の自動化を目指しており、既に画像処理技術を用いた吊荷旋回制御装置(ジャイアン®)※1や衛星測位技術を用いたタワークレーンの2次元自動誘導システム※2を実用化してきました。本システムはそれらをベースにさらなる効率的なシステムとして開発したものです。
現在、東京都内の作業所等において衛星やセンサー情報のデータ集積と分析を進めており、2020年度に実現場での試行を予定しています。
- ※1 当社リリース「揚重作業の効率向上と安全性確保を実現-画像処理技術を用いた吊荷旋回制御装置を開発-」
https://www.toda.co.jp/assets/pdf/20170803.pdf - ※2 当社リリース「自動クレーンで効率作業!-第1弾:衛星測位技術を用いたタワークレーンの2次元自動誘導システム-」
https://www.toda.co.jp/assets/pdf/20180308.pdf

開発の背景
従来のタワークレーンによる揚重作業には、以下のような課題がありました。
- 1夜間や悪天候時には、作業の安全性確保に困難を伴う。
- 2技術者の高齢化等により、安全かつスムーズで熟練した技術を持つオペレータが少なくなる。
システムの概要
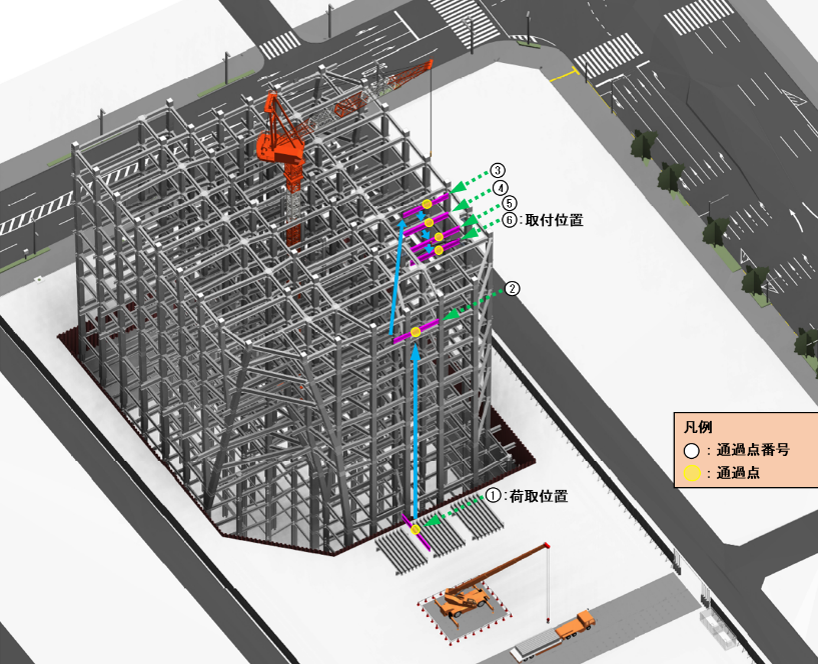
当システムは、①鉄骨BIMデータと施工計画データの活用システム、②揚重部材の自動判別システム、③移動ルートを自動作成する「自動通過点算出システム」で構成されており、荷取位置から部材の取付位置までの一連のタワークレーン作業を3次元自動誘導するものです。
- 1鉄骨製作図のBIMデータを基に、部材毎に時間軸(施工順序)と部材情報(位置や識別NO)を付加したデータを作成します。
- 2揚重部材の自動判定システムでは、荷取り地点で揚重する部材に取り付けられたRFIDタグを読み取り、クレーンオペレータがモニター上でBIMデータと照合します。
- 3「自動通過点算出システム」は、鉄骨BIMデータを活用して現場の施工計画に基づいて、②において読み取った部材ごとの吊荷通過ポイントを算出させ、そのデータをタワークレーンに伝えます。これにより、タワークレーンは自動運転を開始し、荷取り地点から取付位置まで自動誘導します(図1)。
また、揚重部材の位置、姿勢制御は、鉄骨部材やブーム先端の位置・加速度等の情報をタワークレーンに設置したGNSS(Global Navigation Satellite System)※3アンテナ、センサー及び高感度カメラによって把握し、それにより夜間や悪天候時においても安全かつ効率的な自動運転が可能となります。
- ※3 全地球測位システム:人工衛星を使用して地上の現在位置を計測する「衛星測位システム」のうち、全地球を測位対象とすることができるシステムのこと。
{kind=link}
{kind=link}
今後について
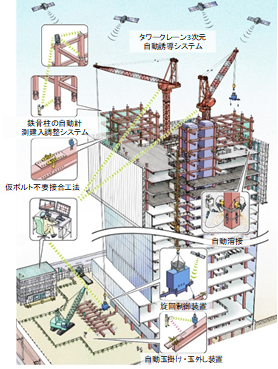
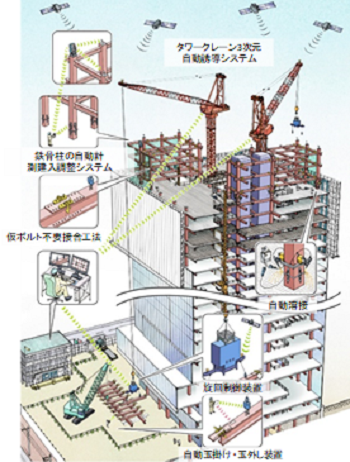
本システムは、2020年度内に実現場での試行を開始し、2022年には実施工を目指します。当社では、本システムと開発済みの自動鉄骨計測・建入れシステム、仮ボルト不要接合工法「ガチャントピン®」および自動溶接ロボット等との組み合わせにより鉄骨工事の完全自動化を目指しています(図2)。