新着情報 鋼製支保工建て込みの切羽無人化施工システム 新たな接合方法による組み立て実験で所期の性能を確認
2021/01/15
戸田建設(株)(社長:今井 雅則)は、トンネル工事における鋼製支保工建て込み時の切羽無人化施工システムの開発を目的に、筑波技術研究所の構造・施工実験棟にて組み立て実験を行い、所期の性能を確認しました(写真1)。
本システムは、トンネル工事で用いるエレクタ一体型吹付機※1に改良を加え、切羽直下に作業員が立ち入ることなく、オペレータ1名による遠隔操作で鋼製支保工の建て込み、ボルト締め付け、位置決めを可能とする切羽無人化施工を実現するものです。本システムの適用により、トンネル工事の安全性向上と、省人化による生産性向上を推進していきます。
- ※1 鋼製支保工の建て込み作業と吹付けコンクリート作業に用いる施工機械

開発の背景
山岳トンネル工事の鋼製支保工建て込み作業では、掘削直後の切羽直下に作業員が立ち入るため、トンネル工事全体の労働災害のうち肌落ち※2による労働災害が40%程度と多く発生しています。これらの実情を踏まえ、厚生労働省より2016年に「山岳トンネル工事の切羽における肌落ち災害防止対策に係るガイドライン」が発令され、事前調査による地山の状況把握や肌落ち防止計画の策定に加え、機械化による肌落ち災害の防止対策が求められています。
山岳トンネル工事は、地山変化に応じて臨機応変な施工が求められるため、自動化・無人化対策が遅れていますが、近年、作業員の高齢化や熟練作業員不足の課題に対応して、安全性向上、施工の省人化、自動化、生産性向上が強く求められています。
これらを背景に、トンネル労働災害の最も多い鋼製支保工の建て込み作業において、切羽直下に作業員が立ち入らない、切羽無人化施工システムの実現に向けて技術開発を積極的に推進しています。
- ※2 掘削された表面の土砂や岩が崩れ落ちること
鋼製支保工の切羽無人化施工システムの特長
本システムは、オペレータ1名が遠隔操作で鋼製支保工の建て込み、ボルト締め付け、位置決めを可能とする切羽無人化施工を実現するものであり、以下に示す特長があります。
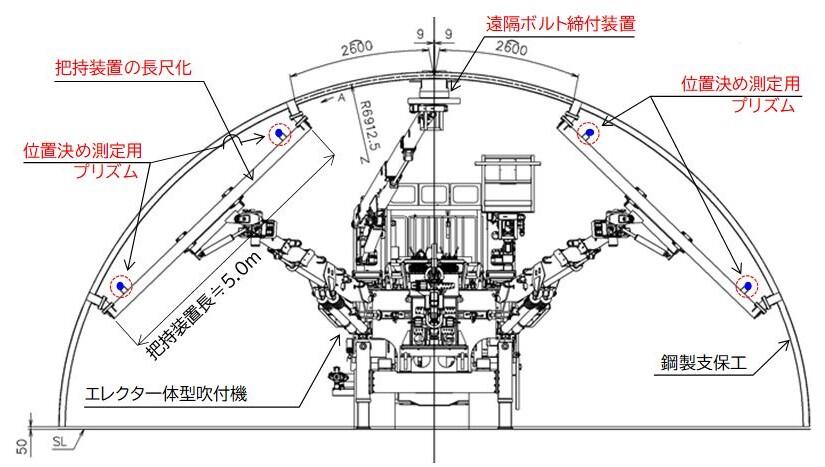
- 1従来の鋼製支保工建て込み作業は、照射レーザーを基準に切羽直下の作業員の目視確認・指示によりオペレータが操作します。これに対し、本システムでは長尺化した把持装置(従来1m⇒5m)に位置決め測定用プリズムを設置(図1)し、後方の自動追尾式トータルステーションで測定した鋼製支保工の位置をモニタリングしながら、微調整機構を有した高性能エレクタを用いて、精度よく設計位置に建て込むことができます。
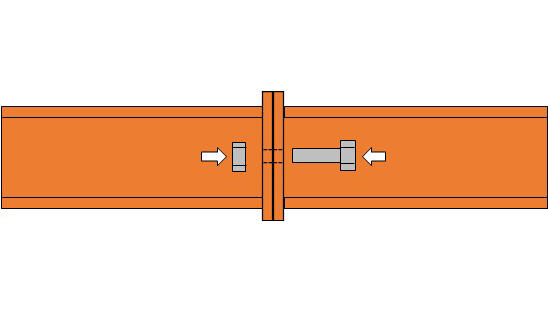
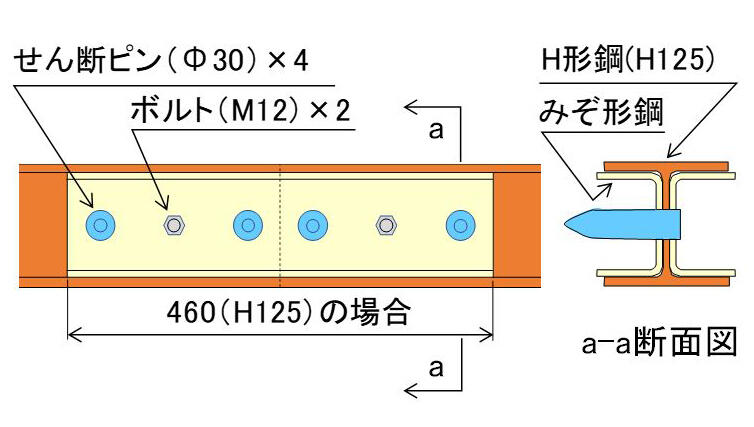
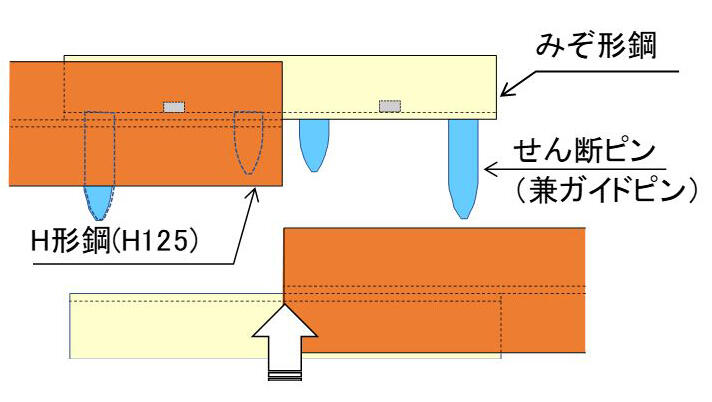
- 2従来の鋼製支保工の接合は、作業員が切羽直下に立ち入り横断方向にボルト・ナットで接合(図2)しますが、本システムでは左右H形鋼の継手部にせん断ピン付きみぞ形鋼を配置し、前後方向で重ね合わせ、切羽正面からボルト締め付け作業ができる構造としています(図3、4)。 本接合方法において、みぞ形鋼はH形鋼の凹部に収まり、曲げモーメント作用時に継手部の変形を拘束するとともに、4本のせん断ピンが曲げモーメントを伝達する機能によって従来接合と同等以上の強度性能を発揮します。また、両端部のせん断ピンを長くすることで、重ね合わせて組み立てる際のガイドピンとしても機能します。
- 3鋼製支保工組み立て後は、開発した遠隔ボルト締付装置を用いて切羽正面から緊結作業を行います。本締付装置は施工機械本体の搭乗用バスケット台座に搭載し、位置・角度調整機構を有するナットランナ※3で、オペレータがカメラモニタを見ながら遠隔でボルト締め付け作業を実施できます(写真2)。なお、ボルト締め付け作業は、継手部に予め溶接されたナットにナットランナでボルトを締結します。
- ※3 自動車、機械等の製造ラインで使用されるボルト締付け装置
今後の展開
組み立て実験で得られたデータに基づき、現場適用のためのシステムを確立し、2021年度より現場試験施工を積み重ねて切羽無人化施工システムの完成を目指します。さらに、全自動化システムの構築に向けて取り組み、山岳トンネル工事における安全性の向上、生産性の向上に努めていきます。
