新着情報 吹付け厚さのリアルタイム計測・管理技術の開発 モーションキャプチャーカメラによる吹付けロボットアーム位置計測
2021/01/27
生産性・品質管理向上・遠隔操作・管理に向けた
新技術の開発と実用化
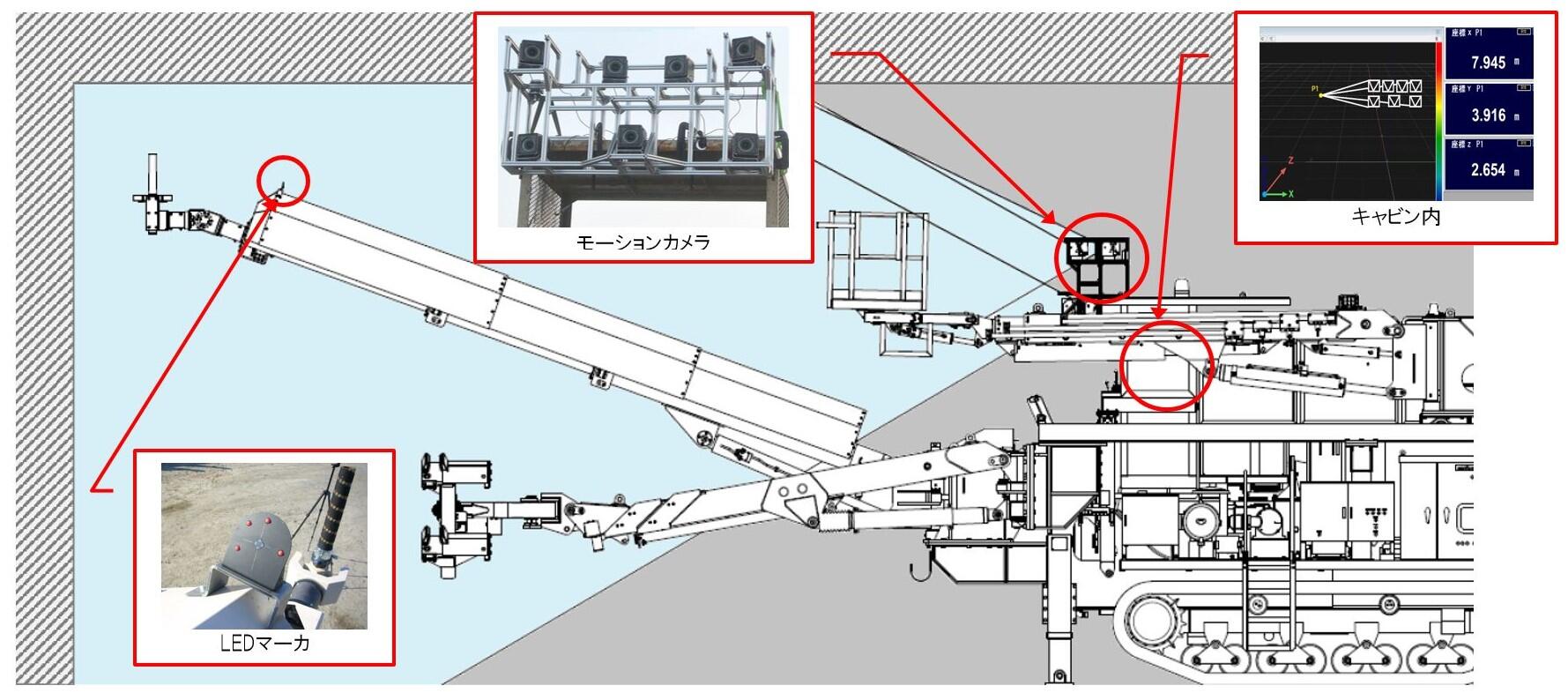
エフティーエス(株)(社長:木村 浩之)と、清水建設(株)(社長:井上 和幸)、戸田建設(株)(社長:今井 雅則)、西松建設(株)(社長:髙瀨 伸利)、前田建設工業(株)(社長:前田 操治)は共同で、モーションキャプチャーカメラによる吹付けロボットの位置計測技術を開発した。(図1)
近年、建設業における ICT 化が進み、省人化、省力化は必須となっている。
特に山岳トンネルにおける掘削先端部(切羽)は、オペレータが地山面を目視確認しながら施工を行っており、省人化、省力化ならびに、より安全で生産性の高い施工を行うことが課題となっている。
本共同開発では、吹付け作業の完全自動化を目指した、次世代吹付システムの開発を進めている。
モーションキャプチャーカメラによる吹付けロボット位置計測システムは、共同開発中の次世代吹付システム要素技術の一つである。伸縮や回転を繰り返すロボットアームの測位は、これまで機械的なセンシング(例えば、角度計や伸縮計など)によって算出する手法が一般的であった。しかし、たわみ量のキャリブレーションに高度な技術が必要であり、また、センシング用計器の維持管理は、現場運用において課題があった。本共同開発では、吹付けロボットのアーム位置計測にモーションキャプチャーカメラ技術を応用する事で、簡便なシステムながらも精度の高い計測手法を実現した。
既往技術の問題点と今回開発したシステムを以下に述べる。
既往技術と問題点
- 1リモコンによる手動操作を前提とした吹付けロボットアームは、多関節で複雑な動きに対応している。
ノズル座標を計測する場合は関節のセンシングから得られる情報を基に相対座標計測後にトンネル坑内座標系に変換する。この場合、ロボットの経年変化やセンシング計器の誤差が積算される。さらに、吹付けロボットアーム長は、約10mある事から、稼働姿勢ごとにたわみの影響を受け、結果的にアーム位置先端誤差が理論上と比較して10~15cmになる。よって、吹付けコンクリート厚さの測定には適していない。 - 2モーションキャプチャーカメラで吹付けロボットアームの位置計測を高精度で行う場合、ターゲットマーカーを取り囲むようにカメラを配置する必要がある。しかし、トンネル切羽は日々進行するため、ベースマシンキャビン等にカメラを一方向にしか搭載できない。この場合、計測走査線上にアームとマーカが重なり物理的にノズル近傍を計測できない場合が発生する。また、一方向の計測は、奥行方向の測位精度に課題があった。
- 3モーションキャプチャーカメラのターゲットは、極小の反射ビーズが塗布されたプラスチック製反射マーカをターゲットとするが、トンネル坑内の作業空間内では十分な反射が得られない事があり、また外的要因によりノイズなどの影響を受け高精度な位置計測に課題があった。
開発したシステム
- 1新たに開発した吹付けロボットは、関節数を8ケから6ケに減らし機械誤差の要因を少なくするとともに、構成部材の剛性を上げてたわみ量を最小限に抑えた。油圧シリンダーは、PLC制御タイプにすることで、ロボットアームのより最適で微細な稼働調整を可能とし8ケの関節数と同等の操作性を実現した。また、関節数が少なくなったためモーションキャプチャーカメラとマーカ間の走査線を遮るものがなくなり、安定したモーションキャプチャーカメラのターゲット測位検知を実現した。
- 2マーカを計測するモーションキャプチャーカメラは、吹付け機ベースマシンのキャビン屋根部に設置し(図1、3)吹付けロボットの可動空間14m(幅)×8m(高さ)×10m(奥行)内のマーカを、高精度に計測するために最適な台数と方位角に調整されている。また、モーションキャプチャーカメラで追尾するマーカは、新たに自発光タイプのLEDマーカを採用した(図1、2)。自発光式LEDマーカは、トンネルの坑内照明とは波長が異なり、他波長の影響を受けることなく的確に計測されるものとなっている。これらにより、吹付空間におけるマーカの位置計測精度±1cm以内を実現した。さらに計測したロボットアームの座標値を、トンネル坑内の測量座標系に変換一致させることで、トンネル設計のモデル空間内における吹付ロボットのノズル位置を、高精度に合成表現させることが可能となった。(図4)



{kind=link}
{kind=link}
{kind=link}
今後は、ロボットアームのデジタル制御技術を組み合わせて、遠隔あるいは完全自動化にむけた吹付ロボット開発を強力に推進し、広く全国に普及してゆく予定である。