新着情報 非SLAM型自律飛行ドローンを用いたトンネル内3次元座標取得の検証
2023/03/16
戸田建設(株)(本社:東京都中央区、社長:大谷 清介)と (株)Spiral(本社:東京都葛飾区、社長:石川 知寛)は、GNSSが届かない建設中の山岳トンネルにおいて、SLAM技術※1を必要としない「非SLAM型自律飛行ドローン」を活用した3次元座標取得の検証を開始しました。ドローンにより取得した情報とAI技術が携した新たな生産性向上技術の開発を目指します。
- ※1非GNSS環境下で自己位置の推定と周辺地図の作成を同時に行う技術
背景・課題
昨今の建設業では少子高齢化に伴う技術者不足が問題となっており、生産性向上が求められています。山岳トンネル工事においても同様であり、狭隘な空間内で重機と作業員が輻輳している環境下において、従来の目視による観察や計測の業務は多くの人員や時間を要し、同時に危険も伴うため、その改善技術が期待されています。最近ではGNSSが届かないトンネル坑内において、自律飛行の試みも多く試行されているなか、より高度な自律飛行による情報取得を可能とすることで、施工現場における定常的なドローンの実装を目的としています。
本検証の概要
自律飛行システム
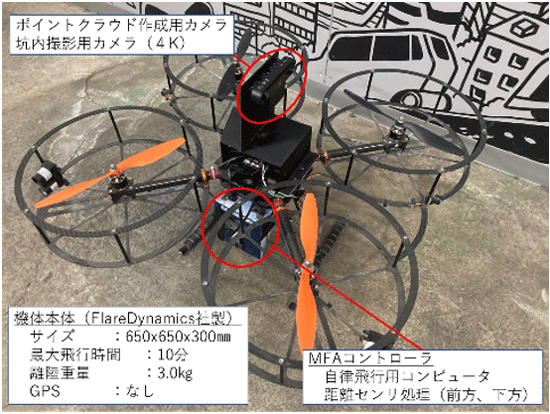
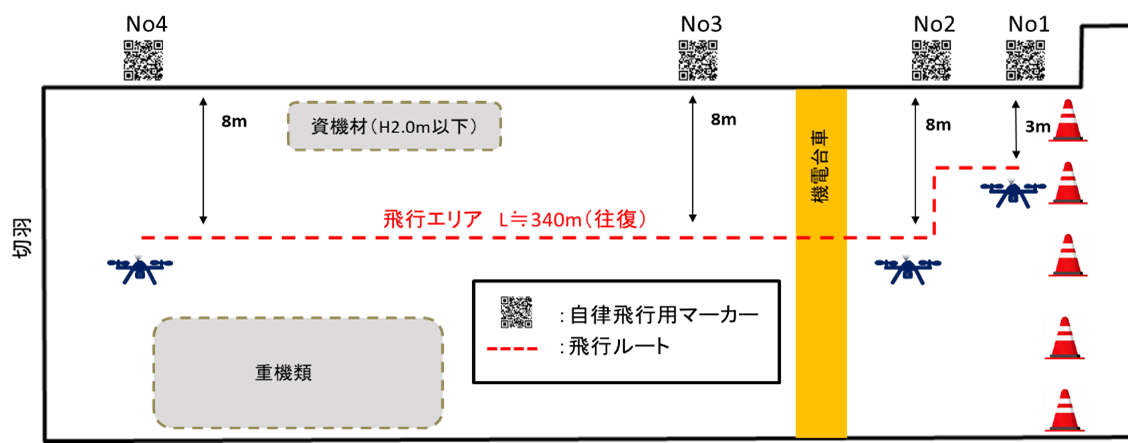
自律飛行における制御機構は、Spiral社の「MarkFlexAir(マークフレックスエアー)」を使用しました。本システムは、飛行情報を記憶させた専用マーカーをドローンが読み取ることで自律飛行を可能とします。飛行中は接触防止センサーおよび距離計により障害物を回避し、搭載したカメラ画像(4K/30fps)による情報はWi-Fiを介して、専用のアプリケーション上でリアルタイムに監視ができます。
また、SLAM技術を必要としない飛行制御を行っているため、山岳トンネルのような特徴点が少ない場所においても高速かつ長距離飛行が可能となり、より多くの情報を取得することが期待できます。

3次元座標取得
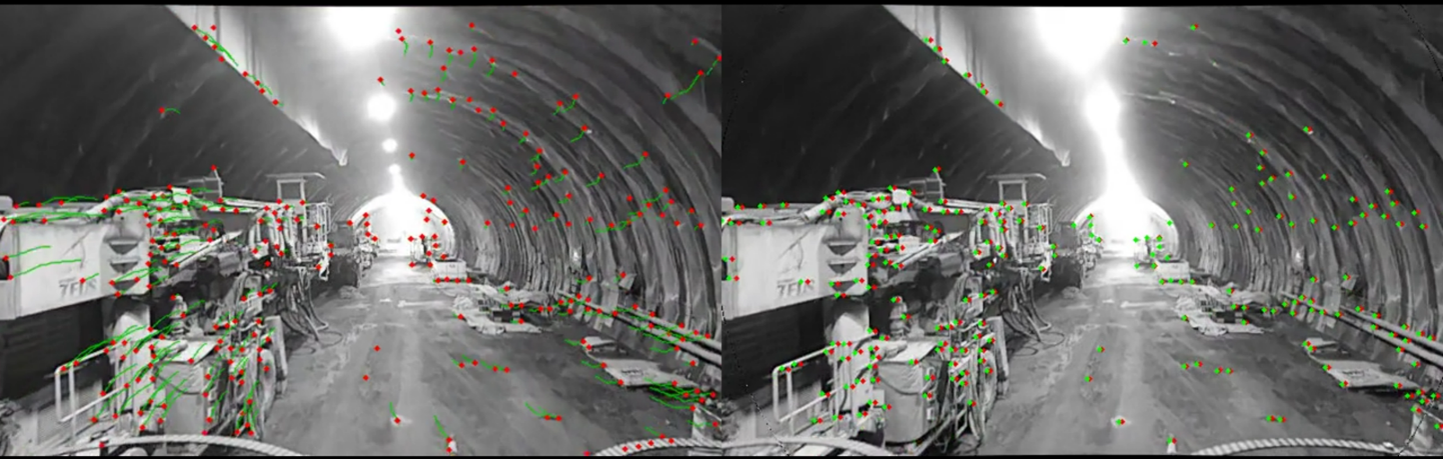
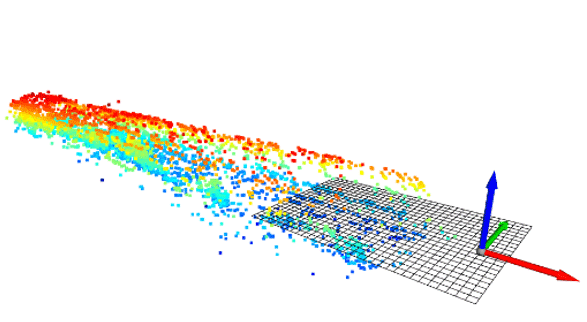
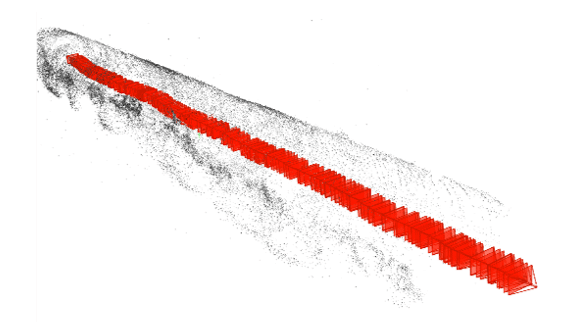
3次元座標は、機体進行方向(切羽方向)に向けて搭載したステレオカメラで撮影した画像を用いて、Visual SLAMとSfM(Structure from Motion)の2つの手法によってポイントクラウド(点群座標)を作成しました。ステレオカメラを用いることにより、2つのカメラの距離から、ポイントクラウド上での距離の算出が可能となります。標定点などによる補正がない状態では、飛行距離に対して3%程度の誤差であることが分かりました。今後、自律飛行用のマーカー情報に座標を付与し、またポイントクラウド作成のアルゴリズムの改良などにより、トンネル坑内を飛行するドローン座標や各設備の座標を高精度に取得することが期待できます。
本検証は、現在当社において施工中の「新名神高速道路 宇治田原トンネル東工事」※2において、切羽までの約170m間において飛行試験を行い、本システムの実用性を確認しています。
- ※2発注者:西日本高速道路(株)
今後の展望
今後は、以下の点を検証することで、施工現場における実運用を目指します。
- ポイントクラウド作成時のアルゴリズムを改良し、3次元座標情報の精度を向上させます。
- 接触防止機能を改良することで、重機類が輻輳する環境下でも自律飛行を可能とします。
- 取得した3次元座標情報とAI技術が連携した生産性向上技術の開発を行います。