新着情報 傾斜したインバート鉄筋上を安定走行する出来形計測ロボットを開発 撮影動画から高精度な3Dモデルを生成、出来形計測の省力化や面的管理、BIM/CIM連携を実現
2026/05/21
戸田建設(株)(本社:東京都中央区、社長:大谷 清介)は建ロボテック(株)(本社:香川県木田郡三木町、社長:眞部 達也)の協力のもと、山岳トンネル底部において、インバートの曲面形状により傾斜した鉄筋上を安定して走行できる出来形計測ロボットを開発しました。本ロボットで撮影した動画から3Dモデルを生成し、任意箇所の出来形計測を可能にすることで、従来のスケール(巻尺)を用いた計測が不要となり、計測作業の省力化に加え、出来形の面的な管理や、BIM/CIMモデルとのデータ連携を実現しました。
開発の背景
山岳トンネル工事におけるインバート鉄筋の出来形計測は、足場の不安定な鉄筋上で現場職員がスケールを用いて手作業で行っており、安全面・効率面で課題がありました。また、計測結果が点的な記録にとどまるため、出来形を面的に把握できず、取得したデータを事後に活用しにくいという課題もありました。
本ロボットの概要
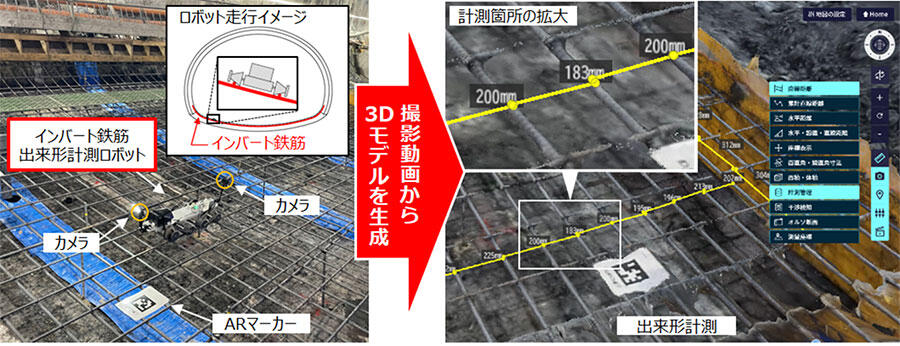
これらの課題を解決するため、本ロボットはインバート鉄筋上を安定して走行しながら動画撮影を行えるようにしました(図-1)。
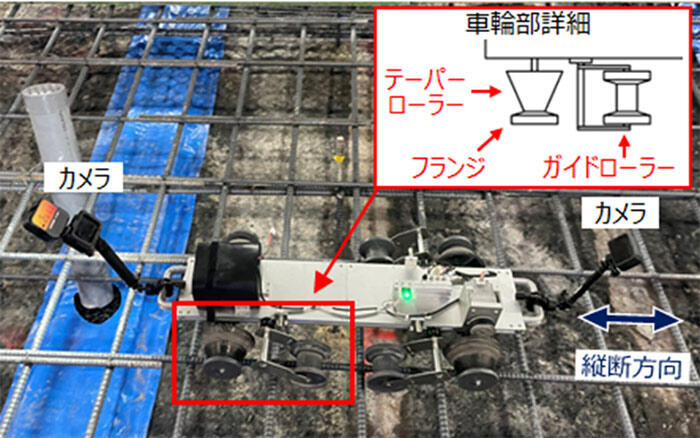
山岳トンネルのインバート鉄筋は、横断方向に配置されたアーチ状の鉄筋と、その上側に配置した縦断方向の直線状の鉄筋で構成されています。本ロボットは、この直線状の鉄筋2本をレールとして、走行用の車輪により縦断方向に自走します。
しかし、特に重ね継手部において、車体左右の鉄筋の高低差や幅の変化により、車輪が鉄筋から外れて脱落するという問題がありました。これを解決するため、車輪の内側をテーパー形状にするとともに、外側にフランジを追加しました。さらに、前輪と後輪の間にガイドローラーを設けることで、安定した走行を実現しました(図-2)。
3Dモデルによる出来形管理の概要
本ロボットは車体の前後に1台ずつカメラを搭載しており、走行しながら動画を撮影します。撮影した動画を用いてSfM(Structure from Motion)※1の技術により3Dモデルを生成します。この処理には、動画をアップロードするだけで自動生成できるCalTa(株)のTRANCITY®を利用しています。ロボットがインバート鉄筋から一定の距離・速度を保って撮影するため、人手による撮影と比べて高精度な3Dモデルを生成できます。また、インバート鉄筋だけでなく、床掘表面も同時に3Dモデル化できます(図-3)。
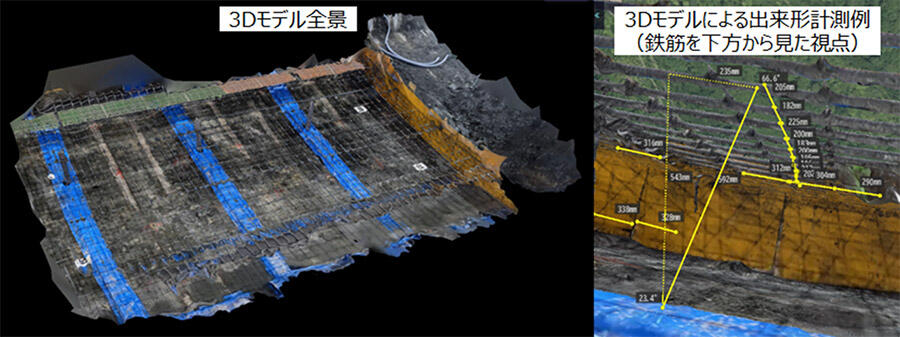
生成した3Dモデル上で任意箇所の出来形を計測できるため、従来のスケールによる計測は不要となります。また、3Dモデルを保存することで、コンクリート打設後も鉄筋の出来形を確認できます。さらに、ARマーカーを用いて3Dモデルに座標を付与することで、施工記録としてBIM/CIMモデルに統合し、維持管理へ引き継ぐことが可能となります。
なお、本技術に関する一連の動作の検証は、当社施工の新名神高速道路宇治田原トンネル東工事(発注者:西日本高速道路(株))にて実施しました。
- ※1 複数の写真や動画から3Dモデルを生成する手法
今後の展望
本ロボットでは、インバート鉄筋と同時に取得した床掘形状の情報に、インバートの設計形状を組み合わせることで、打設コンクリートの数量を算出することが可能になります。これを自動発注システム等と連携させることで、生産性の向上が見込まれます。
また、本ロボットにインバート鉄筋の結束機能を追加し、結束作業と出来形計測を同時に自動化することで、さらなる省力化と効率的な出来形管理の実現が期待できます。
今後も当社は、山岳トンネル施工の安全性や生産性の向上を目指し、「ToP-NATM®」※2のさらなる高度化に取り組んでまいります。
- ※2山岳トンネルの掘削から覆工コンクリートに至る一連の工種において遠隔化・自動化技術を統合し、「ToP-NATM®」(Toda Progressive-NATM)として技術メニュー化しております。
- ToP-NATM®に関する詳細について:https://www.toda.co.jp/tech/mountain_tunnel/topnatm2.html