新着情報 タワークレーン3次元自動誘導システムの精度と作業効率を大幅にアップ! タワークレーンのコアコントロールシステム・ユニットを開発
2022/05/09
戸田建設(株)(社長:大谷 清介)は、タワークレーン3次元自動誘導システム※1の精度及び作業効率を向上させる、新たなシステムを開発しました。本システムは、GNSS(Global Navigation Satellite System)※2受信機、各種センサー及び高感度カメラによって、タワークレーンで吊り上げた吊荷の位置、方向、姿勢及び吊荷の振れを把握・制御し、状況に応じた安全かつ効率的な方法で吊荷を指定の位置に自動的に誘導するものです。本システムにより、従来は作業の安全性確保に多くの手間と時間を必要とした夜間や悪天候時でも、安全かつ正確なタワークレーンの自動運転が可能となります。
2021年度に本システムの実証試験を繰り返し実施し、その有効性を確認しました。
- ※1 当社リリース「タワークレーンの3次元自動誘導システムを開発-タワークレーン2次元自動誘導システムをバージョンアップ-」
- ※2 全地球測位システム:人工衛星を使用して地上の現在位置を計測する「衛星測位システム」のうち、全地球を測位対象とすることができるシステムのこと

開発の背景
従来のタワークレーンによる揚重作業には、以下のような課題がありました。
- 1夜間や悪天候時には、作業の安全性確保に困難を伴う。
- 2我が国の少子高齢化等を背景とした技術者の減少により、安全かつスムーズに運転できる熟練した技術を持つオペレーターが少なくなる。
システムの概要
当システムは、搭載した各種のセンサー情報を用いて吊荷の姿勢や揺れの制御・玉掛払し等を行う「コアコントロールユニット」と、このユニットが取得した情報を収集し、各種端末にて表示・制御するための「コアコントロールシステム」で構成されています。この2つが連動することで、タワークレーンや吊荷の状況をリアルタイムに把握し、従来より精度よく、かつ効率よく指定の位置へ誘導することが可能となります。
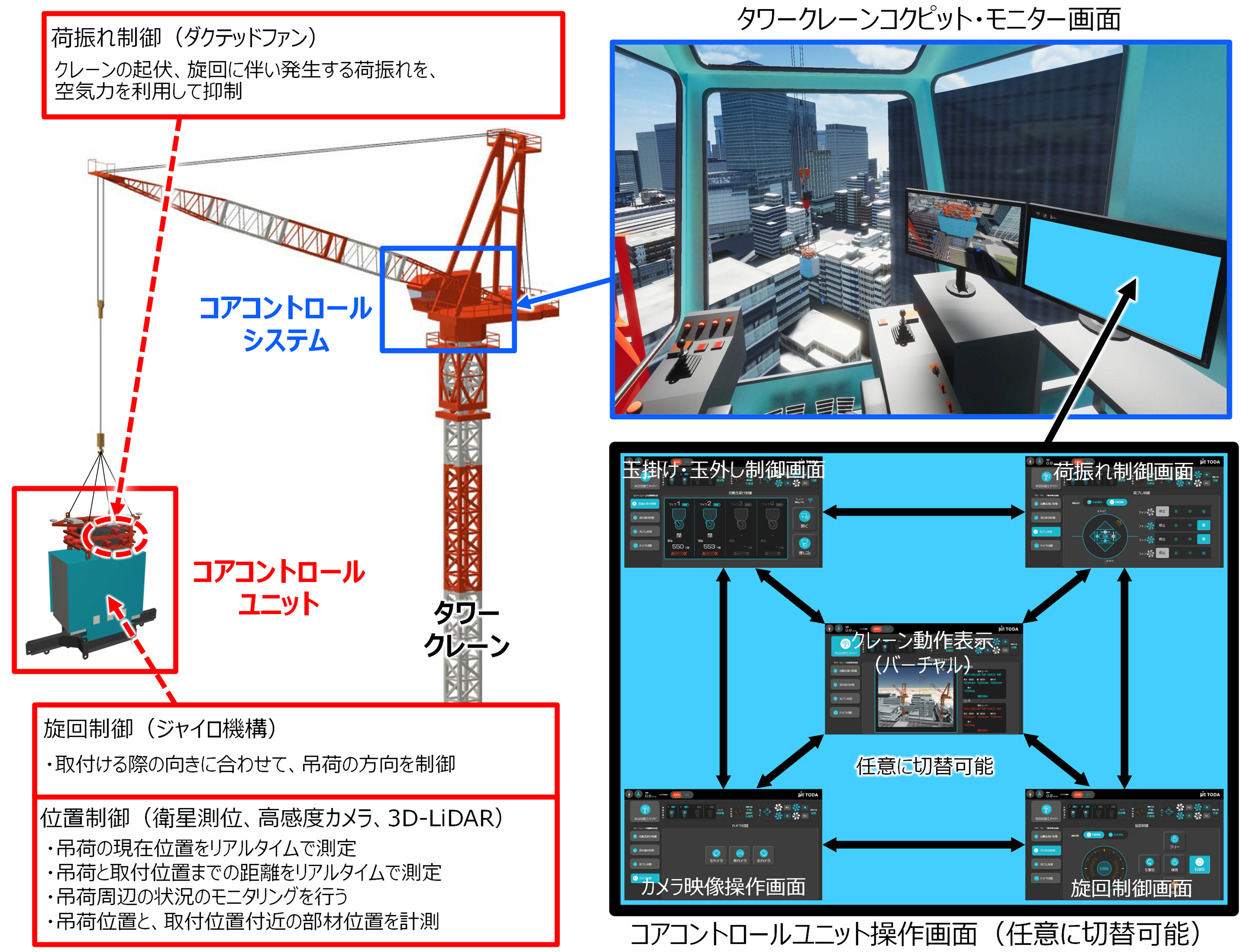
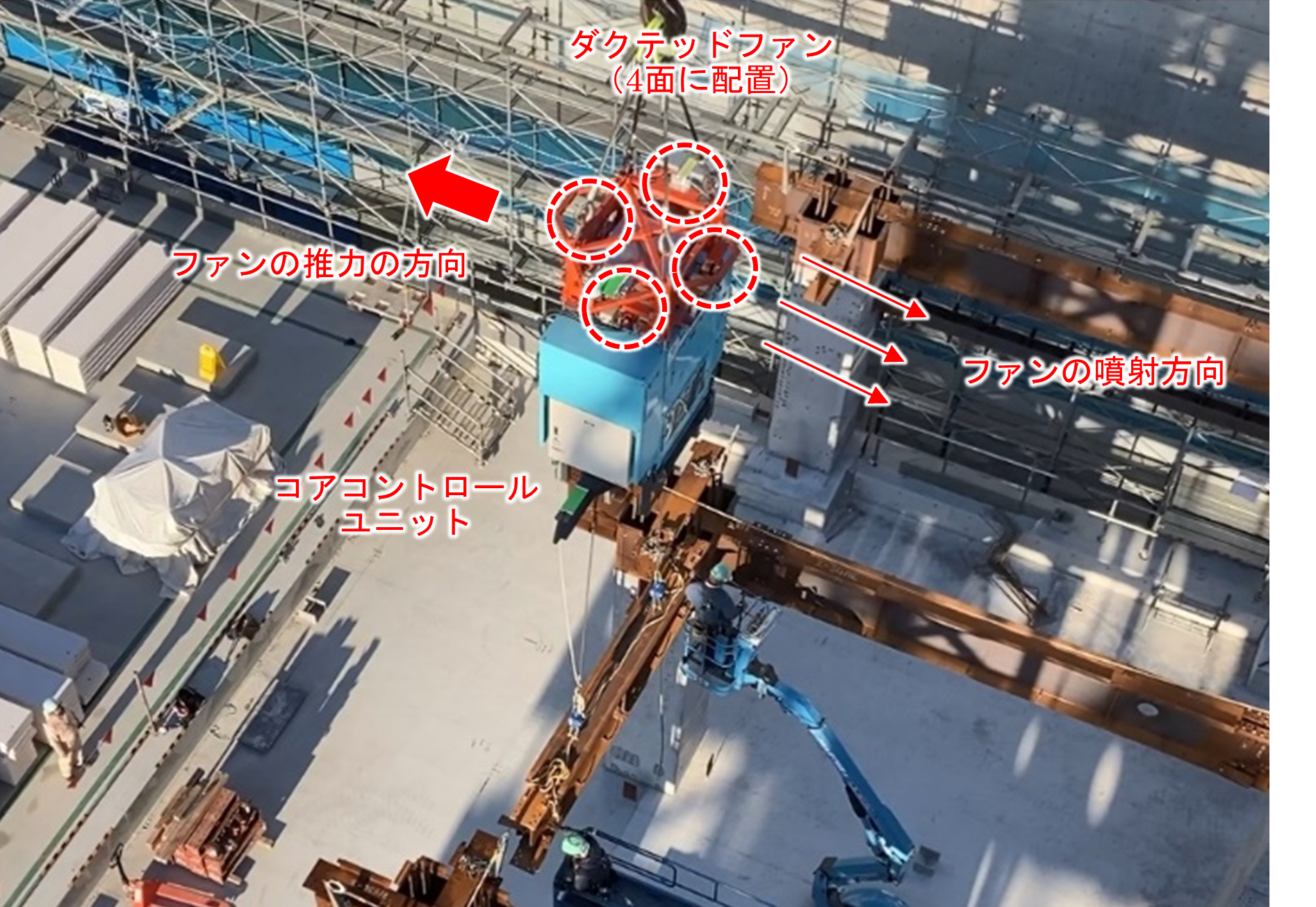
なお、コアコントロールユニットには、これまでになかった新たな荷振れ制御システムも搭載されています。ユニット内にあるモーションセンサーが吊荷の振れを検知すると、吊荷の振れる方向(速度)とは逆の向きに推力が発生するよう、ダクテッドファンと呼ばれる推進器が稼働し、吊荷の振れを自動で抑制します。これにより、従来はオペレーターの技量に依存していた荷振れ制御が可能となります(足利大学仁田教授との共同研究/特許出願中)。
今後について
本システムは2020年度に実現場で試行を開始し、2021年度は実証試験にてその有効性を確認しました。当社が開発した自動鉄骨計測・建入れシステムおよび仮ボルト不要接合工法「ガチャントピンⓇ」等の技術と組み合わせることで、当社は鉄骨・PC工事の更なる自動化を目指します。