新着情報 鉄骨工事自動化技術を実証施工 建設業のDX化を目指して
2024/06/26
戸田建設(株)(本社:東京都中央区、社長:大谷 清介)は、東京都中央区の超高層建築物の建設現場※1において「鉄骨工事自動化技術」を適用しました。
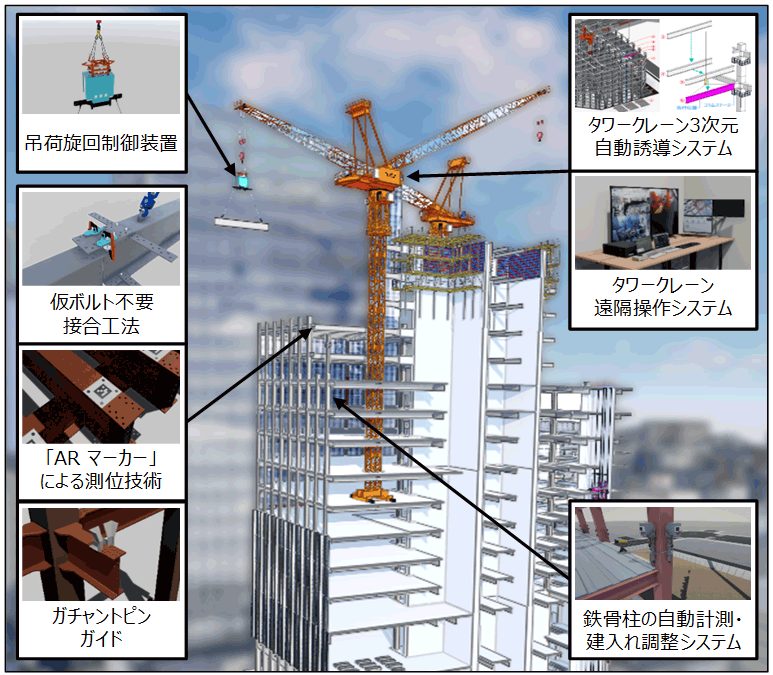
今回の実証施工では、当社が開発し実績のある「タワークレーン3次元自動誘導システム」※2、「吊荷旋回制御装置」※3、「仮ボルト不要接合工法」※4、「鉄骨柱の自動計測・建入れ調整システム」※5に加え、新たに開発した「タワークレーン遠隔操作システム」や「AR※6マーカー」による測位技術、「ガチャントピンガイドTM」を連携させ、鉄骨工事の省力化に幅広く有効であることを確認しました。
- ※1 TODA BUILDING
- ※2当社リリース「タワークレーンの3次元自動誘導システムを開発-タワークレーン2次元自動誘導システムをバージョンアップ-」
- ※3当社リリース「揚重作業の効率向上と安全性確保を実現-画像処理技術を用いた吊荷旋回制御装置を開発-」
- ※4当社リリース「鉄骨工事の作業効率と安全性を向上-仮ボルト不要接合工法を開発-」
- ※5当社リリース「鉄骨柱の自動計測・建入れ調整システム」を展開-情報化施工技術による建設現場生産性向上-」
- ※6AR:「Augmented Reality」の略で、「拡張現実」を意味する。
開発の背景
従来の鉄骨工事には、以下の課題がありました。
- 専門技能を持つ鳶工やクレーンオペレーター(以下、オペレーター)が減少し、鉄骨工事作業員の確保が困難になりつつある。
- 鉄骨建方時、鳶工は高所で作業する必要があるため、墜落の危険性を伴う。
- オペレーターは、タワークレーン頂部の運転席まで毎日登り降りしなければならず、一度登ると一日中タワークレーン上に拘束されるため、負担が大きい。
- 夜間や雨天時におけるタワークレーンでの揚重作業では、目視による確認が難しく、作業の安全性が低下する。
これらの課題を解決するために、当社は鉄骨工事の自動化を目指し、幅広い「鉄骨工事自動化技術」の開発を進めてまいりました。
新たに開発した技術
今回の実証施工に向けて、以下の技術を新たに開発しました。
- 1
- 「タワークレーン遠隔操作システム」
- 専用の操縦席を用いて、離れた場所から遠隔でタワークレーンを操作できるシステムです。
- 2
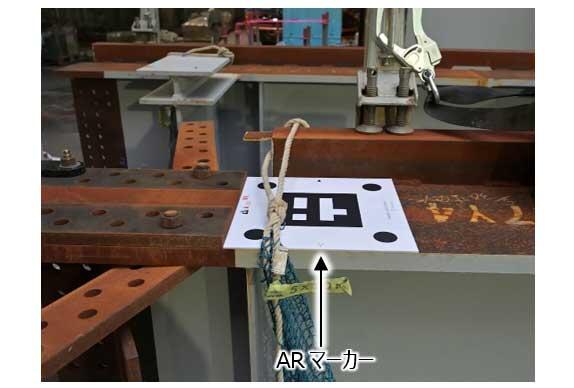
- 「ARマーカー」による測位技術
- タワークレーンで吊り上げた鉄骨部材の現在位置と、その部材の取り付け予定位置との誤差を自動で計測し、カメラ映像上に表示する技術です。誤差の計測をする際に「ARマーカー」を活用しています。
- 3
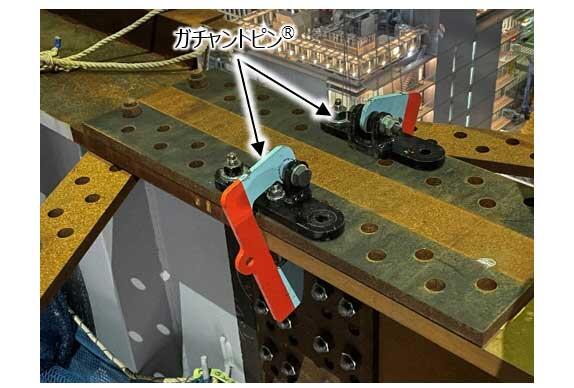
- 「ガチャントピンガイドTM」
-
「仮ボルト不要接合工法」を用いて鉄骨梁を仮固定する際に「仮ボルト不要接合治具(ガチャントピン®)」
の接合ピンを、所定の位置まで誘導するガイドです。
実証施工の内容
実証施工では、一連の鉄骨工事で各々の「鉄骨工事自動化技術」を適用し、その機能を確認しています。
- 1「タワークレーン3次元自動誘導システム」および「タワークレーン遠隔操作システム」により、タワークレーンを自動および遠隔で運転し、揚重作業の安全性の向上を図るとともに、両システムが実現場で運用できることを実証しました。(写真1・2)
- 2「吊荷旋回制御装置」により鉄骨部材の方向および姿勢を制御することで、揚重作業の作業性と安全性を向上させました。(写真3)
- 3「ARマーカー」による測位技術を用いて、鉄骨梁の取り付け位置に対する誤差を補正し、鉄骨梁の位置合わせ作業を省略することで、作業効率の向上を図りました。(写真4)
- 4「ガチャントピンガイドTM」により、「仮ボルト不要接合治具(ガチャントピン®)」の接合ピンを所定の位置まで誘導し、鉄骨梁をスムーズに取り付けることで、作業の省力化を図りました。(写真5)
- 5「仮ボルト不要接合工法」により、取り付け位置において鉄骨梁を簡易に仮固定することで、鉄骨梁取り付け作業を省力化し作業時間を短縮しました。(写真6)
- 6「鉄骨柱の自動計測・建入れ調整システム」により、鉄骨柱の建入れ調整作業を自動で行い、誤差3mm以内の高い精度で施工しました。(写真7)





今後の展開
「鉄骨工事自動化技術」は幅広い鉄骨工事の省力化や安全性の向上を目的としたものですが、今後はPCa工事への適用拡大も視野に入れ、建設工事における自動化施工を更に推進します。さらに「タワークレーン遠隔操作システム」については、オペレーターの育成用シミュレータとしての利用や、オフサイトに設けたオペレーションセンターから遠隔地のタワークレーンを一元的に操作する等、育成並びに労働環境の向上を目指してまいります。