新着情報 自律飛行ドローンによる切羽自動監視システムを開発 山岳トンネル工事における切羽観察作業の自動化を実現
2025/01/29
戸田建設(株)(本社:東京都中央区、社長:大谷 清介)は(株)Spiral(本社:東京都葛飾区、代表取締役CEO:石川 知寛)とGreenBee(株)(本社:東京都中央区、代表取締役:岩本 定則)の協力を得て、自律飛行ドローンによる切羽自動監視システムを開発し、施工中のトンネルにおける技術検証にも成功しました。このシステムにより、トンネル工事における切羽観察作業の自動化が実現します。
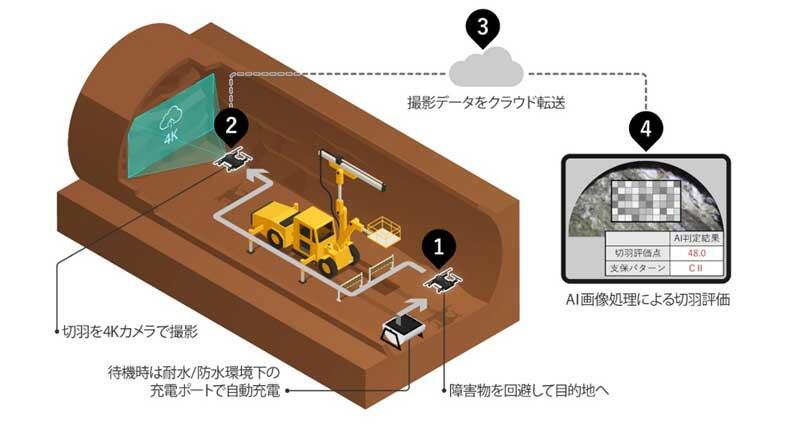
本システムは、山岳トンネルのようなGNSS※1が利用できない環境下でも自律飛行を可能とする「非SLAM※2型自律飛行ドローン」に切羽検知機能とAIによる切羽評価機能を付加することで、切羽観察における一連の作業を自動化するものです(図-1)。
- ※1GNSS:人工衛星を用いて位置を高精度に計測できるシステム
- ※2SLAM:特徴点の距離と方向から自己位置推定と周辺地図作成を同時に行う技術
開発の背景
建設業では、昨今の少子高齢化に伴う技術者不足や危険箇所における災害抑止などの課題解決が求められており、目視点検や計測業務の省人化さらには無人化の必要性が増しています。当社は、山岳トンネルなどの非GNSS環境下において情報の取得を自動化するための検証を繰り返し、ドローンが撮影する動画データ等の活用を実現場へ導入する準備を進めてきました※3。一方で、重機類をはじめ、坑内設備の位置が日々変化する動的環境に対応するためには、大きく2つの機能が必要でした。1つは重機類を避けて飛行する「障害物回避機能」で、2つ目は掘削の進行に伴い日々移動する切羽位置を認識するための「切羽の自動検知機能」です。
- ※3当社プレスリリース
非SLAM型自律飛行ドローンを用いたトンネル内3次元座標取得の検証 トンネル内自律飛行ドローンの開発 ~飛行速度を追求できる非SLAM型自律飛行ドローンによる障害物回避飛行の検証に成功~
システムの特徴
一連の自動化システムの構成要素を以下に示します。
- (1)現場技術員が直観的に操作可能な”切羽検知アプリ(MFA-Tracker切羽モード)” (図-2)
- 飛行計画モード:事前セットされた飛行計画を選択するだけで適切な飛行を指示
- ライブビューモード:ドローンのリアルタイムな飛行ルートやストリーミング動画を確認
- 切羽検知モード:対象とする切羽測点を入力するだけで、適正な位置で切羽写真を自動で撮影
- 画像検出モード:撮影した写真の中から、AIが評価に適切な写真(画角や大きさ)を自動的に検出
上記4つのモードを活用することで、「障害物回避機能」や「切羽の自動検知機能」を持たせた自律飛行が可能となります。
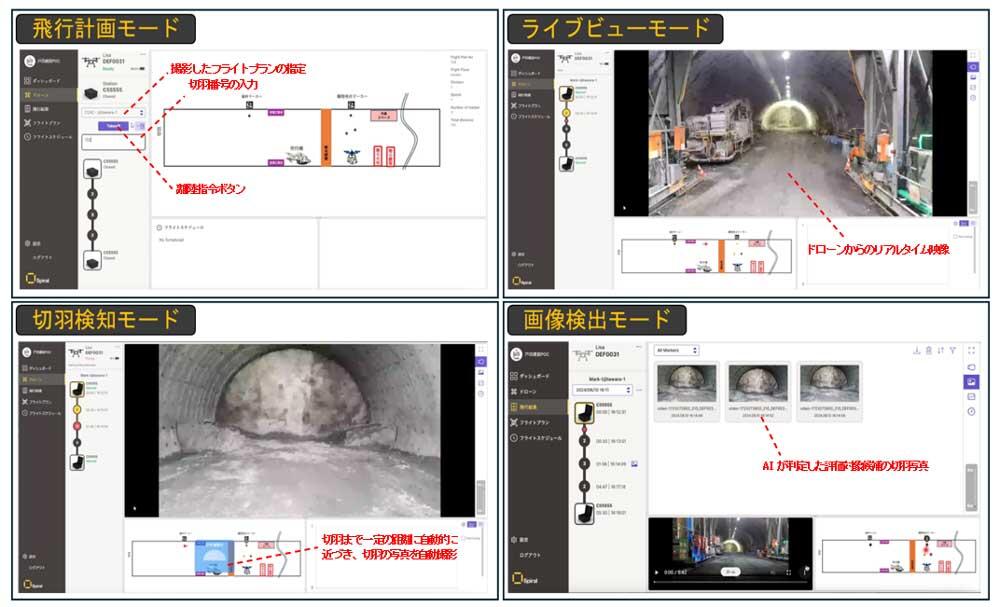
図-2 切羽検知アプリ概要 - (2)メンテナンスフリーの”充電ポート※4”(図-3)
- 待機/充電中は自動的に防塵・防水・冷房搭載のキャノピー(ドローンの格納ボックス)が閉まり、ドローンの状態を保護する
- 着陸時にはドローンの位置を適正にするポジションパッド、脚を挟み充電するドッキングパッドの二つを組み合わせて自動位置調整及び自動充電を行う
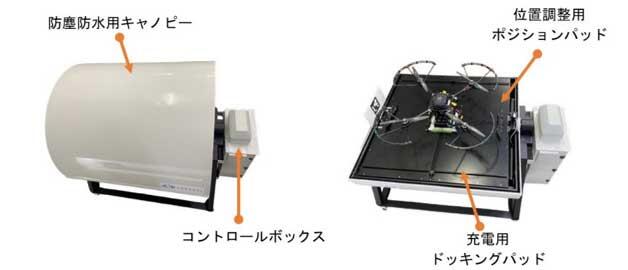
図-3 ドローンポート概要 - ※4自動充電型ドローンポート:https://www.sorabot.com/dronenest
- (3)AI切羽評価機能※5
- 人が撮影した写真を取り込み、AIで評価するシステムを切羽検知アプリに連携することで、写真の自動取得から評価まで一連の作業を自動化
検証概要
当社の山岳トンネル工事において「障害物回避機能」と「切羽の自動検知機能」を搭載したドローンの自律飛行システムを用い、飛行安定性及び画像取得、AIによる切羽評価まで含めた一連のシステムについての効果検証を行いました。その結果、充電ポートから自律で離陸しトンネル坑内の撮影をしながら重機等の障害物を回避、適切な位置で切羽を撮影後帰還し、充電ポートへの着陸まで完全自動運用ができること、更に数百枚の切羽写真からAIが切羽監視に適切な写真を選定し、AIが適切に評価を行えることを確認しました。
これまで写真の撮影から切羽の評価(帳票作成)に2時間程度有していた作業が、本システムでは合計17分へと時間を短縮かつ自動化することで、日々の作業の効率化が図れることがわかりました。
- 写真取得(6分)
- データアップロード(1分)
- 切羽AI評価システムのよる評価と帳票作成(10分)
今後の展望
本検証により、自律飛行ドローンを用いた切羽の自動検知について、安定的に飛行し画像取得及び評価を行えることを確認しました。今後はトンネル坑内での自律飛行におけるフェールセーフ機能の向上を行っていきます。合わせて精度向上と試験運用を進めることで、施工中のトンネル現場での本格運用を2025年度中に開始することを目指します。