新着情報 爆薬装填ホース自動挿入装置を開発 ラインスキャナとAIロボットアームの活用で装填作業の高精度化を実現
2025/07/24
戸田建設(株)(本社:東京都中央区、社長:大谷 清介)は、(株)UP設計コンサルタント(本社:大阪府大阪市、代表:道上 敦之)、(株)HCI(本社:大阪府泉大津市、社長:奥山 浩司)、(株)虎乃門建設機械(本社:東京都渋谷区、代表:櫻井 弘毅)の協力のもと、山岳トンネル発破作業の安全性向上のため、切羽(トンネル掘削の最先端部)作業の無人化に寄与する爆薬装填ホース自動挿入装置を開発しました(写真-1)。
従来、爆薬の装填作業は、作業員が崩落の危険性が高い切羽に立ち入り、手作業で爆薬を装薬孔に装填していました。本装置は、照度や色調の影響を受けないラインスキャナとAI画像処理技術により装薬孔の位置を正確に検出し、AIロボットアームで爆薬装填ホースを自動で高精度に挿入した後、送り装置でホースを装薬孔の奥まで押し込みます。これにより、爆薬の装填作業を遠隔化・自動化でき、安全性が大幅に向上します。
開発の背景
当社では、山岳トンネル施工の安全性や生産性の向上を目指し、一連の作業を遠隔化・自動化する「ToP-NATM®」の開発を進めています。その一環として、発破掘削における爆薬の自動装填システムの開発に取り組んでいます。
爆薬を自動装填するためには、切羽に開けた装薬孔の位置を正確に検出し、高精度に爆薬装填ホースを挿入する必要があります。しかし、トンネル内では機械の影や岩盤の色調の違いがあり、映像による手法では位置検出が難しいという課題がありました。
本装置の概要
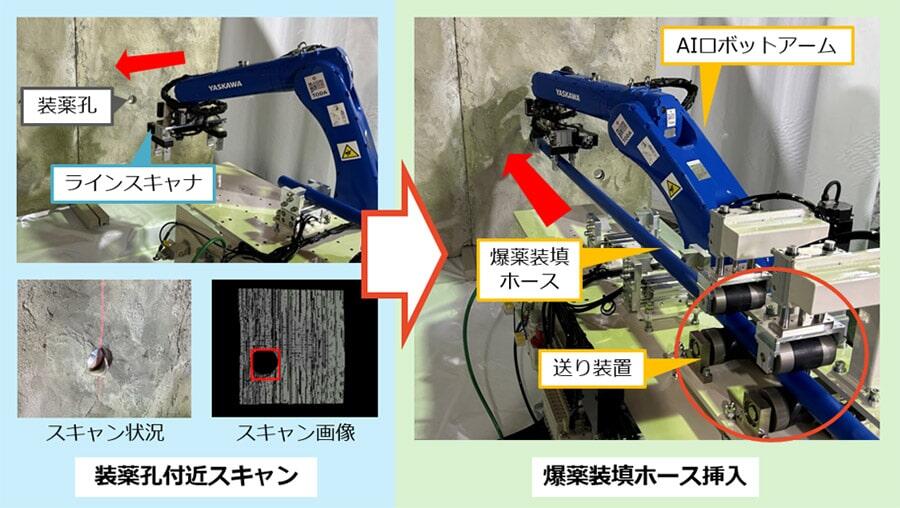
本装置は、ラインスキャナ、AIロボットアームおよび送り装置で構成されています(写真-1)。
ラインスキャナは、対象物を線状にスキャンして距離情報を取得します。このスキャナをAIロボットアームで横方向に移動させながら縦方向に連続スキャンすることで、平面的に距離情報を取得できます。取得した距離情報から、遠方を暗く表示して装薬孔内部を際立たせることで、照度や色調などの環境条件の影響を受けずに装薬孔の位置を可視化できます。
AIロボットアームは、AI画像処理技術や力覚センサーと容易に連携可能なロボットコントローラーが搭載されています。ラインスキャナで可視化した装薬孔付近の画像から、AI画像処理技術により装薬孔の中心位置を検出し、その位置にアームが自動で爆薬装填ホースを運んで挿入します。挿入時には、アーム先端の力覚センサーがホースと孔壁の接触を感知し、自動的に位置を微調整します。
送り装置は、装薬孔に挿入後のホースを上下2組のローラーで挟み込み、回転動作によりホースを奥まで押し込むことができます。
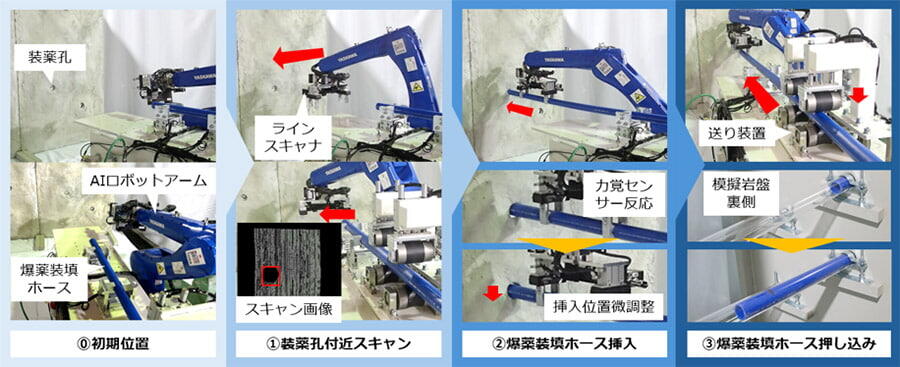
検証実験
検証実験は(株)HCIの板原第2工場で実施しました。模擬岩盤を対象に、装薬孔の検出から爆薬装填ホースの挿入・押し込みまでの一連の工程を自動で実施できることを確認しました(写真-2)。
今後の展望
今後は、本装置の精度および速度を向上させ、現場への適用を進めていく予定です。さらに、原材料が非爆薬で自動化機械での扱いに適した現場製造バルクエマルジョン爆薬※1や、起爆用の配線の結線作業が不要となる無線発破システム※2との連携により発破作業の完全自動化を目指してまいります。今後も当社は、「ToP-NATM®」のさらなる高度化を通じて、山岳トンネル施工の安全性や生産性の向上に取り組んでまいります。
- ※1当社ニュースリリース
国内トンネル初となる現場製造バルクエマルジョン爆薬による発破を実現
https://www.toda.co.jp/news/2024/20240412_003349.html - ※2当社ニュースリリース
トンネル全体の電波暗室化に成功し、無線発破システムを確立
https://www.toda.co.jp/news/2025/20250627_006081.html